
3. Characteristics of the MODIS instrument and routine AOD production
3.1 The MODIS Instrument
The MODerate resolution Imaging Spectrometer (MODIS) instrument flies on the Earth Observation System’s (EOS) Terra and Aqua satellites. Both satellites are polar-orbiting, with Terra on a daytime descending orbit (northeast to southwest) over the equator about 10:30 local sun time, and Aqua on a daytime ascending orbit (southeast to northwest) over the equator about 13:30 local sun time. The orbital height of about 700 km above the surface and the ±55° view scan (perpendicular to the flight direction), means that the MODIS instruments view the earth with a swath of about 2330 km. This results in nearly global coverage on a daily basis, with repeat orbits every 16 days. Small gaps exist between overpasses near the equator. MODIS performs measurements in 36 spectral channels (or bands) that cover the solar to thermal infrared spectrum region between 0.41 to 14.2 μm (Salomonson et al., 1989). Nominal pixel resolutions (at nadir) are 0.25 km (for 2 bands), 0.5 km (for 5 bands) and 1 km (for 29 bands). Detailed specifications and components can be found at http://modis.gsfc.nasa.gov.
MODIS collects data by the use of a continually rotating scan mirror. Each scan of the mirror images 10 lines of 1 km pixels, (20/40 lines of 0.5/0.25 km pixels). Due to the combined factors of the large viewing angle at the ends of the scans and the Earth’s curvature, 1 km pixels grow to approximately 4.8 km wide by 2.0 km long at swath edge. This gives rise to the geolocational oddity known as the panoramic “bow-tie” effect which means that the scan pattern looks like a bow tie due to the expansion and overlap of the pixels near the edge of the scans. For simplification, pixel size will refer to nadir pixel size, unless stated otherwise.
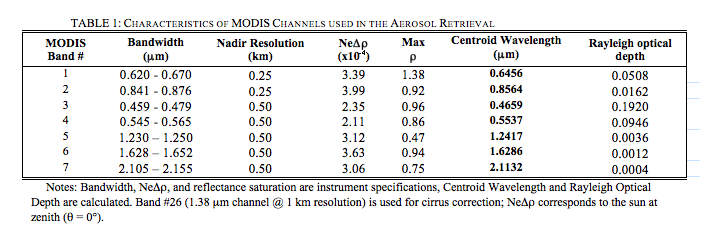
MODIS measures electronic photon counts that when calibrated against known reflective sources are automatically converted to reflectance units (eq 21). To be useful for aerosol retrieval, the MODIS instrument must be spectrally stable and sensitive to small differences in reflectance. The spectral stability for each instrument is better than 2 nm (0.002 mm). The ‘Noise Equivalent Differential Spectral Radiance’ is a property of the instrument, which can be converted to reflectance units as NeΔr. ‘Signal to Noise Ratio’ (SNR) is defined as the ratio of the ‘typical scene reflectance” to its noise. The NeΔr and the SNR specifications are given in Table 1. To be understood in the framework of aerosol remote sensing, the definition of SNR should be based on the expected aerosol signal. Therefore, a ‘Noise Equivalent Differential optical depth (NeΔt) is defined, where:
 (21)
(21)
where θ0 and θv are the solar and view zenith angles, w0 is the aerosol single scattering albedo and , P(Θ) is the aerosol phase function as a function of scattering angle. The least sensitivity to aerosol scattering optical depth (largest noise) is expected when both sun and satellite are at nadir views (θ0 = θv = 0.0), the phase function is at minimum (Θ ~ 120°) and the channel used is the least sensitive (channel 7, at 2.11 mm). With a phase function value of 0.08 at 120°, a typical aerosol has NeΔt ~ 1.5x10-2. The 2.11 μm channel is also where the ‘typical scene τ’ is (τts) is 0.01 or less. Therefore the SNR ratio defined by the ratio of τts/NeΔt is about 0.65. If one requires SNR>10, then a single 0.5 km pixel is insufficiently sensitive to characterize aerosol. When individual pixels are aggregated to larger areas, say to a box of 10x10 km2 (20x20 pixels) then the SNR is increased significantly (SNR=260). However, in many cases not all pixels within a box are suitable for retrieval (clouds, glint, not dark surface), so SNR is usually less than its theoretical maximum. For noise reduction, as well as to keep scan lines together, the standard MODIS aerosol retrieval is performed at 10 x 10 km (10 scan lines). Section 7 of this ATBD describes the 3km retrieval.
The DT aerosol retrieval over ocean makes explicit use of seven wavelength bands (listed in Table 1). Several additional bands are used for cloud and other screening procedures. Included in Table 1 are estimates of the central wavelength in each band (obtained by integration of the channel-averaged response functions, updated for collection 6 (Levy et al., 2013)). To keep in line with common references in the aerosol literature, MODIS channels 1, 2, 3, 4, 5, 6 and 7 are known in this document as the 0.65, 0.86, 0.47, 0.55, 1.24, 1.63 and 2.11 μm channels, respectively.
3.2 Inputs to the aerosol retrieval
Raw data from each MODIS orbit is analyzed and provided to end users as 5-minute product files called ‘granules’. Each granule is about 2030 km (about 203 scans of 10 km) along the orbital path. Each scan line has a swath width of about 2330 km. Although pixels are nominally 1 km at nadir, due to the expansion of pixel size off nadir this area is actually covered by only 1354 pixels. Therefore each granule is 1354 pixels across (perpendicular to the flight path)) by 2030 pixels long (“along track”) in this ‘1 km’ resolution. Only data from MODIS daytime orbits are considered for retrieval.
Both the land and ocean aerosol algorithms rely on calibrated, geolocated reflectances. This data set is known as ‘Level 1B’ or ‘L1B’ and is provided by the MODIS Characterization Support Team (MCST). These are identified as products MOD02 and MOD03 for Terra and MYD02 and MYD03 for Aqua (MCST 2000; MCST 2002). Hereafter, either ‘MOD’ or ‘MYD’ will be denoted by ‘MxD’. The algorithm uses L1B reflectances at three resolutions (files are denoted as MxD021KM, MxD02HKM and MxD02QKM for 1km, 0.5km and 0.25km resolution channels, respectively). Ignatov et al. (2005) provides a good discussion of these reflectances and possible errors associated with them. In addition, the MODIS dark target algorithm uses as an input the “Wisconsin” cloud mask (MxD35; Frey et al., 2005), which is a ‘Level 2’ (L2) product. Level 2 products are geophysical products created from the L1B data. Finally, the algorithm ingests ancillary data from NCEP (National Center for Environmental Prediction) analyses, including the (closest to granule time) GDAS1 1°x1° 6 hourly meteorological analysis and the TOVS (before 2005) or the TOAST (after 2005) 1°x1° daily ozone analysis. Although the algorithm is designed to make use of NCEP data, when unavailable, it can run successfully without these supplements by using climatology for first guess water vapor, wind speeds, and ozone profiles.
3.3 Production environment
All MODIS L1B and L2 atmospheric products are written in ‘Hierarchical Data Format version 4’, with each stored parameter referred to as a ‘Scientific Data Set’ (SDS) and given a unique name. HDF files must be accessed through HDF library subroutine and function calls which are available in several computer languages. In addition, operational processing employs the ‘Science Data Processing ToolKit’ (SDPTK) and the ‘MODIS Applications Programming Interface’ (M-API), which employ the HDF libraries. The collective system environment is known as the MODIS-Toolkit.
The algorithm to create the MxD04 product is written primarily in Fortran 77, and includes subroutines and functions that interface with the MODIS-Toolkit. Finally, there are additional static files, including the aerosol lookup tables, required for aerosol retrieval. More information about the production details is found at https://atmosphere-imager.gsfc.nasa.gov/products. All operational processing is performed by the MODIS Data Processing System (MODAPS) located at NASA-GSFC. All data are archived and freely available from MODAPS web sites.
3.4 Processing prior to aerosol retrieval including pixel masking
The aerosol algorithm reads in the required L1B, L2 and ancillary data into memory. Specifically, it reads one instrument scan line at a time, where each scan is made up of ten 1 km pixels along track. The 1354 swath pixels are also collected into ten pixel boxes, so that there are 135 ‘10km’ boxes in a swath. Each of these boxes is separately considered for inclusion in the aerosol retrieval. Note that each 10 km box contains 10 x 10 = 100 ‘1 km’ pixels and 20 x 20 = 400 ‘0.5km’ pixels (at nadir resolution). At the scan edges the number of pixels in each box remains the same, but the area encompassed in each box is more than eight times the area encompassed at nadir.
Reflectances in all seven MODIS-aerosol channels, plus the 1.38 μm channel are corrected for water vapor, ozone and carbon dioxide (Appendix 1). In addition to the cloud mask, the MxD03 geolocation product also classifies each pixel as ‘land’, ‘ephemeral water’, ‘coastal’, ‘shallow inland water’, ‘deep inland water’, ‘shallow ocean’, ‘moderate ocean’ or ‘deep ocean’. If all 400 pixels (0.5 km x 0.5 km) within the box are considered water (‘deep inland water’, ‘shallow ocean’, ‘moderate ocean’ or ‘deep ocean’), the algorithm proceeds with the over-ocean retrieval. However, if any pixel is considered non-water, the over-land algorithm is used. This helps to minimize problems introduced by underwater reflectance in shallow water near the coasts. If more than 50% of the pixels within a box are classified as ‘ephemeral water’, ‘coastal’, or ‘shallow inland water’, the algorithm will proceed with the land algorithm, but the retrieval will be assigned a low quality.
3.5 Quality assurance, level 2 'combined' and level 3 products
Ocean and land products are assigned a “quality assurance confidence” flag value (QAC) that represents an aggregate of many individual “quality assurance” tests. The QAC value ranges from 3 to 0, where 3 means ‘good’ quality and 0 means ‘bad’ quality. Presumably, there is more quantitative value to a ‘good’ quality retrieval, rather than one that is ‘fair’, ‘poor’ or ‘bad’. Ultimately the QAC flag reflects our subjective appraisal of the quality of the retrieval based on a consistent set of rules within the algorithm. These rules differ slightly for the ocean and land algorithms.
During aerosol retrieval on a particular 10 km box, the algorithm may proceed normally, proceed with non-fatal errors, or quit because of a fatal error. The ‘quality assurance’ (QA) of the retrieved products is assigned based on the behavior of the algorithm. Individual QA flags are assigned particular values when any errors (fatal or non-fatal) are encountered. When stored within the MxD04 HDF aerosol product files, the QA flags are composed of data ‘bits’ that can be decoded to determine these errors. For example, one QA data flag warns the user to any ‘water’ pixels within the box, even when the land retrieval is still performed. The QA value is also used to derive downstream products, either by its use as a filter for expected quantitative value of the retrieval, or to provide weighting for aggregating/averaging computations. Appendix A3 describes the individual QA flags and how they are used to assign QAC.
The QAC value is used to determine which land or ocean t values go into a combined land and ocean product, known here as the joint L2 product. There are in fact two joint AOD products. The unconstrained product, known as the ‘Image_Optical_Depth_Land_And_Ocean’, has no QAC threshold and is intended for locating plume locations, and creating attractive imagery with fewer holes. The other, known as the ‘Optical_Depth_Land_And_Ocean’, is constrained by QAC, in order to filter out lower confidence data with presumably less quantitative value. For C6, the constrained joint SDS requires QAC≥1 over ocean (QAC=1,2 or 3), and QAC=3 over land.
All MODIS-atmosphere products, including the MxD04 product are aggregated to produce global products on a 1° x 1° degree grid, on daily, weekly, and monthly time scales. These gridded products are known as the Level 3 (L3) products. In addition to providing a filter on the joint L2 aerosol products, the QAC flag helps to derive the aggregate values used in the L3 products. As explained by Levy et al. (2009), how one aggregates and averages the values to derive the gridded, global product can greatly influence the product values. The daily mean L3 product reports quality weighted statistics, where each L2 retrieval is weighted by its QAC value. Those retrievals with QAC = 3 are assigned higher weights than those with QAC = 2 or QAC = 1 and retrievals with QAC=0 are not included in the 1° averages. For the monthly products, two averages are produced; the simple average of all L2 within the box, and the confidence weighted average, which utilizes the QAC.
3.6 Strategy for evaluation and validation of MODIS products
The first step in determining the quality of any product is to ensure that the product outputs make real world physical sense. We evaluate a limited number of product files in typical as well as known problem regimes visually to see if they behave as expected. We look for discontinuities, gaps, or other features that indicate logical errors or other problems. We check that the diagnostic parameters are useful and correct. Mean values and the histograms of retrieved or derived parameters are checked to see if they are reasonable, including at different temporal and spatial scales. Many of these tests are subjective, but they are important for identifying problems in the algorithm or our a priori assumptions.
For all applicable parameters we attempt to perform a product validation. This means that in the aggregate a product is found to conform to a set of “ground-truth” measurements within a self-defined envelope of expected uncertainty. The primary means of MODIS validation is by showing that a product matches equivalent observations from AERONET sun photometer network. We designate a product as validated when at least 2/3 (or one standard deviation) of global matched pairs (e.g. MODIS versus AERONET) are contained within the envelope of expected error which for collection 5.1 we define as
 (22)
(22)
over ocean, and
 (23)
(23)
Levy et al. (2010) showed that the 68.8% of 85,463 C5 land MODIS-AERONET collocations (for AOD at 0.55 μm) fell within the envelope of Equation 23, and the product was therefore designated by the dark target algorithm team to as validated for quantitative scientific purposes. Note that while one can create EE envelopes for any product, not all EE envelopes define “useful” products. For example, based on comparisons performed by Levy et al. (2010) uncertainties for h, the fine fraction of aerosol over land, were condidered too large for that product to be useful.
Prior to operational C6 production of the entire data set, the processing code was run and evaluated on a test bed of 8 complete months of Aqua MODIS granules consisting of July and January 2003, 2008, and 2010, and April and October 2008. These granules were produced with the final C6 L1B. Due to delays in Terra L1B finalization, Terra MODIS granules are not included in the provisional validation. The provisional validation is described in Section 5, and is also described in Levy et al. (2013). The operational C6 data from both Aqua and Terra, will be evaluated and validated after a complete processing of the data set.