
The dark target aerosol algorithm lays out the precise steps used in the retrieval process to go from raw data collected by the instrument to a geophysical product which provides useful information about aerosols in the atmospheric column.
The NASA dark target algorithm is designed to produce a global product to help us understand and monitor the global aerosol system. Although it is possible to tune the retrieval to produce better results in specific locations and regions this has never been the approach taken by the NASA dark target group. A literature search will find many references to such regional and local retrievals/products.
Land vs Ocean
There are actually two dark target algorithms one of which is implemented over the ocean and one of which is used over land. There are distinct pages on this website which are used to describe the ocean and land algorithms and products. The reason for this dual approach has to do with our ability to separate the atmospheric aerosol and surface signals. Land surfaces are quite variable due to vegetation, soil type and topography and this can make it difficult to separate the aerosol signal from the land surface signal. Over ocean where the surface is much less diverse this separation is much easier and we can derive more information about the aerosol properties.
The primary output of the land algorithm is AOD. The Ocean product reports AOD and the size parameters fine mode fraction and angstrom exponent. Please refer to the definitions and product pages for more information.
Product Resolution
All dark target retrievals are made on aggregations of several adjoining pixes. This allows us to aggregate many pixels to increase our signal to noise ratio and create a better product. Native pixel sizes are often different for different sensors and even a single sensor may have bands with different pixel resolutions. The generalized version of the dark target retrieval will, whenever possible, use 1 Km pixels or aggregate or resize pixels to a 1 Km size and then aggregate these to create the final product. Product resolution here refers to the product size at nadir. For some sensors the pixel and therefore the product size will expand significantly as the instrument points off nadir (see Changing Pixel and Product Sizes section further down the page). The table below gives details for each of the dark target products.
| Product | Final Product Size at Nadir | Input Pixel Size | Native Pixel Size |
|---|---|---|---|
| MODIS 10 Km | 10 Km | 1 Km | 500 M |
| MODIS 3 Km | 3 Km | 1 Km | 500 M |
| VIIRS | 6 Km | 750 M | 750 M |
| ABI (GOES) | 10 Km | 1 Km | 500 M |
| AHI (Himawari) | 10 Km | 1 Km | 500 M |
Please see the Validation section for more details.
Changes to Pixel and Product Sizes
No instrument is perfect and not all instruments are created equal. Instruments may be limited by technical constraints both due to a lack of knowledge (we just don't know how to do this yet), self imposed constraints to limit instrument costs or constraints imposed by our environment and/or the laws of physics. It is crucial for any user to understand the pluses and minuses of any instrument and how they affect data collection and products created from the instrument in question. Below we discuss one of the more relevant instrument technical issues affecting dark target and several other satellite products. This example is known as "the bow-tie" effect.
Due to the geometry of the satellite viewing angle, as we point our detector further to the side, the pixel sizes increase.
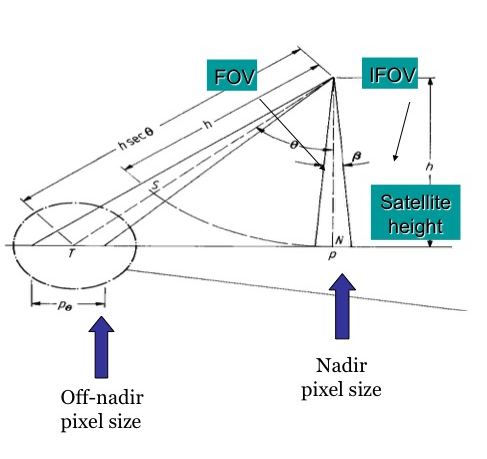
When we aggregate pixels to create a product, the overall size of the product will increase as well. The first graphic below illustrates the bow-tie effect for the MODIS instrument where the pixels sizes increase by almost a factor of four at the scan edge.
![]()
The VIIRS sensor does not experience the same degree of size expansion towards the ends of the swath due to differences in sensor design and algorithm enhancements implemented to reduce pixel overlap. As the instrument views further away from nadir multiple samples are not aggregated in order to save bandwidth. At the swath edge the VIIRS product expansion is limited to a factor of two as compared to the nadir pixels.
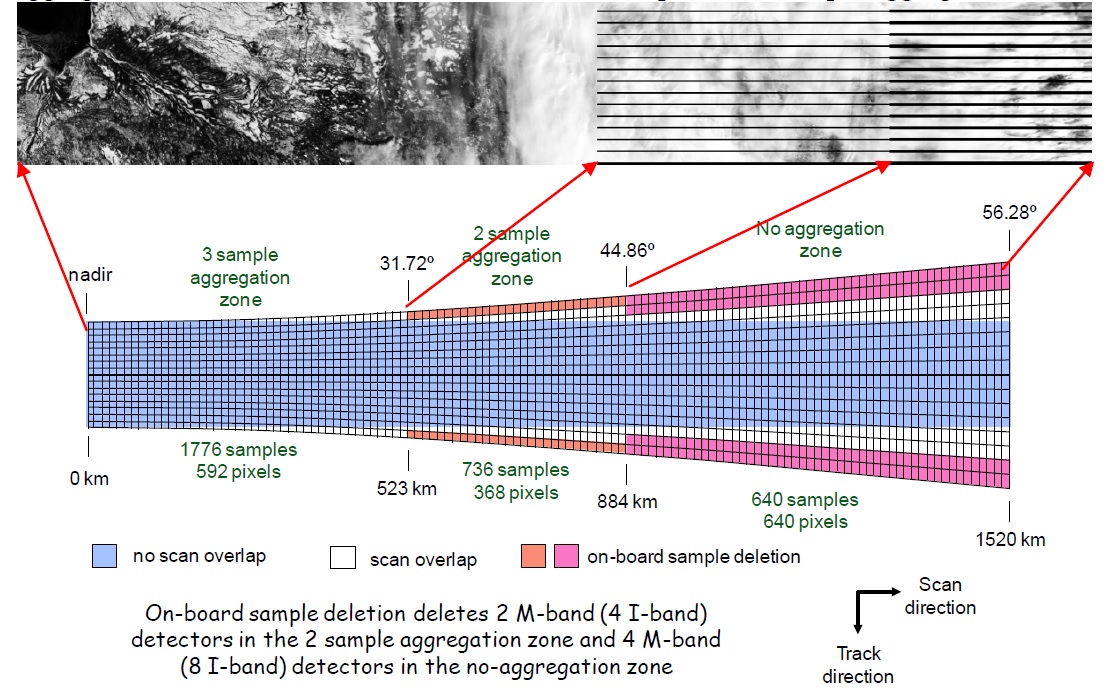
For a very complete presentation on VIIRS instrument design and technical issues please see http://spaceflight101.com/jpss-1/jpss-1/.